Improving the automotive satellite navigation experience
We have all had our challenges using a ‘sat nav’ in our cars. Whether it is a factory-fitted device or an after-market unit, they have all had their limitations. Several examples spring to mind, but the most noticeable is that of limited or poor navigational accuracy when driving through a city district where there are many tall buildings. In the so called “urban canyon”, users typically experience poor and interrupted line of sight to the GNSS constellations – this being at a time when accurate and reliable navigation is most desired! Tall buildings can also reflect GNSS signals leading to further inaccuracies. Another common scenario is driving through a tunnel, resulting in the lost of navigation data and it usually taking a period of time to re-establish the correct position once out of the tunnel.
Recent innovations in global navigation satellite systems (GNSS) however, are now starting to appear across the automotive market. Initially only to be found in top-end automobiles, the concept known as automotive dead reckoning (ADR) combines GNSS data with positional information gathered directly from sensors fitted in the vehicle and a road wheel. In this way, using a simple dead reckoning technique, the current position can be calculated relative to the last GNSS fix. The degree of integration required to the vehicle’s own data network is high making it only possible for fitting at the time the vehicle is built.
Promising to deliver a performance better than using GNSS alone and close to ADR but using an approach that does not require any connection to the vehicle network is untethered dead reckoning (UDR). This works by combining inertial sensing data with GNSS data – see Figure 1.
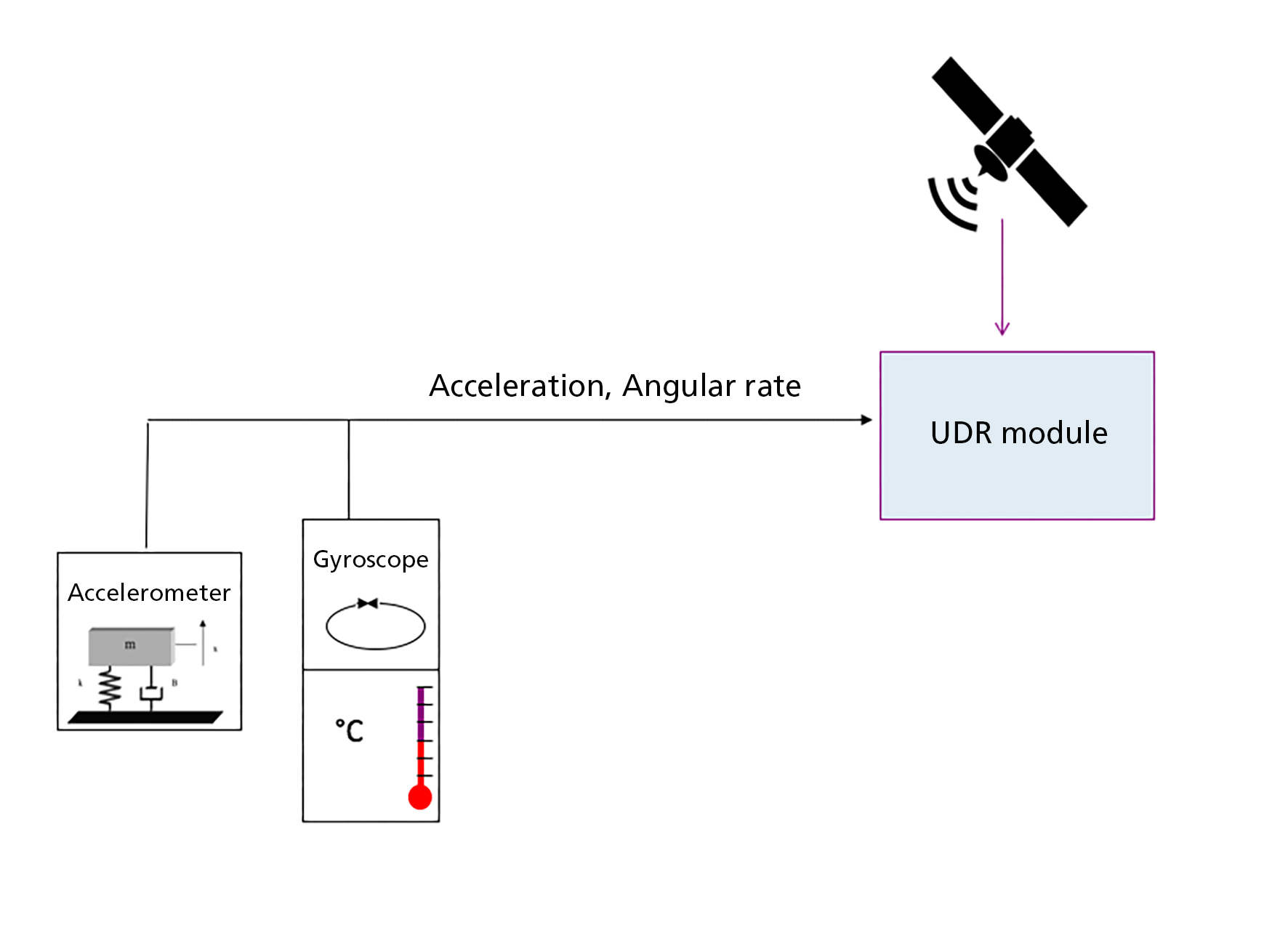
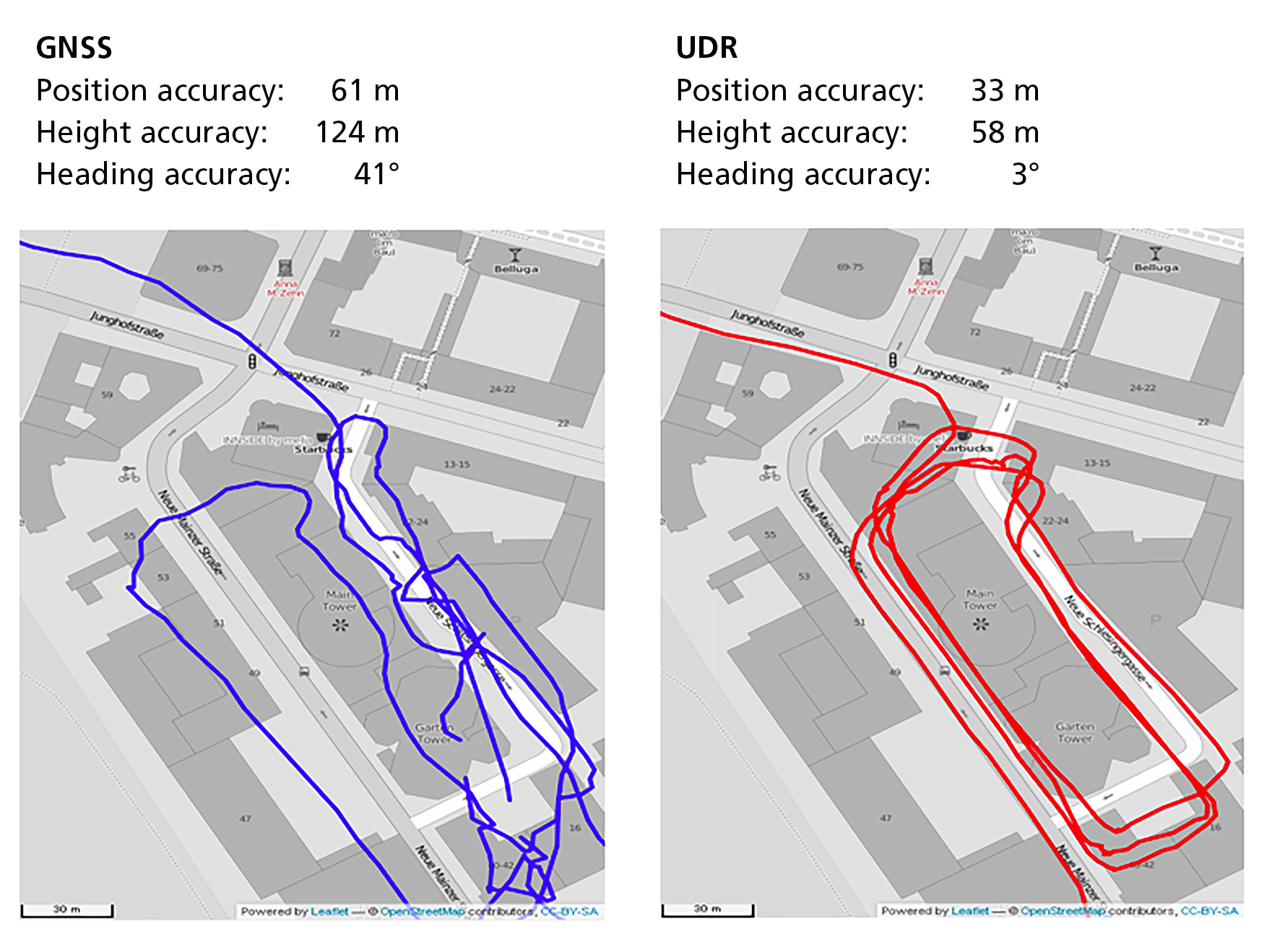
A MEMS accelerometer and a MEMS gyroscope are used to provide accurate measurement of angular and acceleration forces, and these are combined with GNSS data to provide an instantaneous location fix should the GNSS signal be interrupted or become unreliable. By storing the vehicle’s last known position when, for example, it is parked in a multi-story or underground car park, provides an almost instant ability to navigation once the vehicle is started up again. An example of the accuracy achieved by UDR within a build up city area surrounded by tall buildings can be seen in Figure 2.

compared to UDR navigation.
The test results illustrated in Figure 2 show the comparative accuracy between GNSS and UDR using an antenna mounted on the test vehicle’s windscreen. In this test, the UDR positional accuracy is a factor of 3 times better than using GNSS alone. To further demonstrate UDR’s capabilities under poor signal conditions another test run was made, this time with the antenna placed in the vehicle’s foot, well underneath the dashboard. The results can be seen in Figure 3. UDR continued to maintain a factor of three better results in positional accuracy even though the relative position accuracy was not as good as having the antenna screen or dash mounted. Using GNSS alone navigation was clearly impossible.
compared to UDR accuracy.
Both of the above tests were conducted using a UDR module from u-blox, the NEO-M8U. This compact GNSS module measures just 12.2 x 16.0 x 2.4 mm and includes the 3D inertial sensors within the package. It supports multi-constellation GNSS reception from GPS, GLONASS, BeiDou and Galileo. Another more compact UDR module, the EVA-M8E provides the same functionality but requires external mounted gyro and accelerometer sensors in order to achieve a more integrated design.
The fully integrated approach of a UDR module, such as the NEO-M8U, aids achieving the best positional accuracy. Figure 4 illustrates the design of the M8, which uses a tightly coupled Kalman filter that feeds back tracking accuracy information into the GNSS module. The Kalman filter, also known as a linear quadratic estimation algorithm, serves to estimate the vehicle’s location based on a series of measurements and delivers a more accurate estimate than just relying on a single position measurement alone. In this way, and by having the potential to weight each GNSS and sensor signal in a different manner ensures that the highest 3D accuracy can be achieved. When navigating in urban canyons the addition of the data from just one or two satellites improves the accuracy of the dead-reckoned position compared to not having this approach would show very poor accuracy or perhaps not position at all.

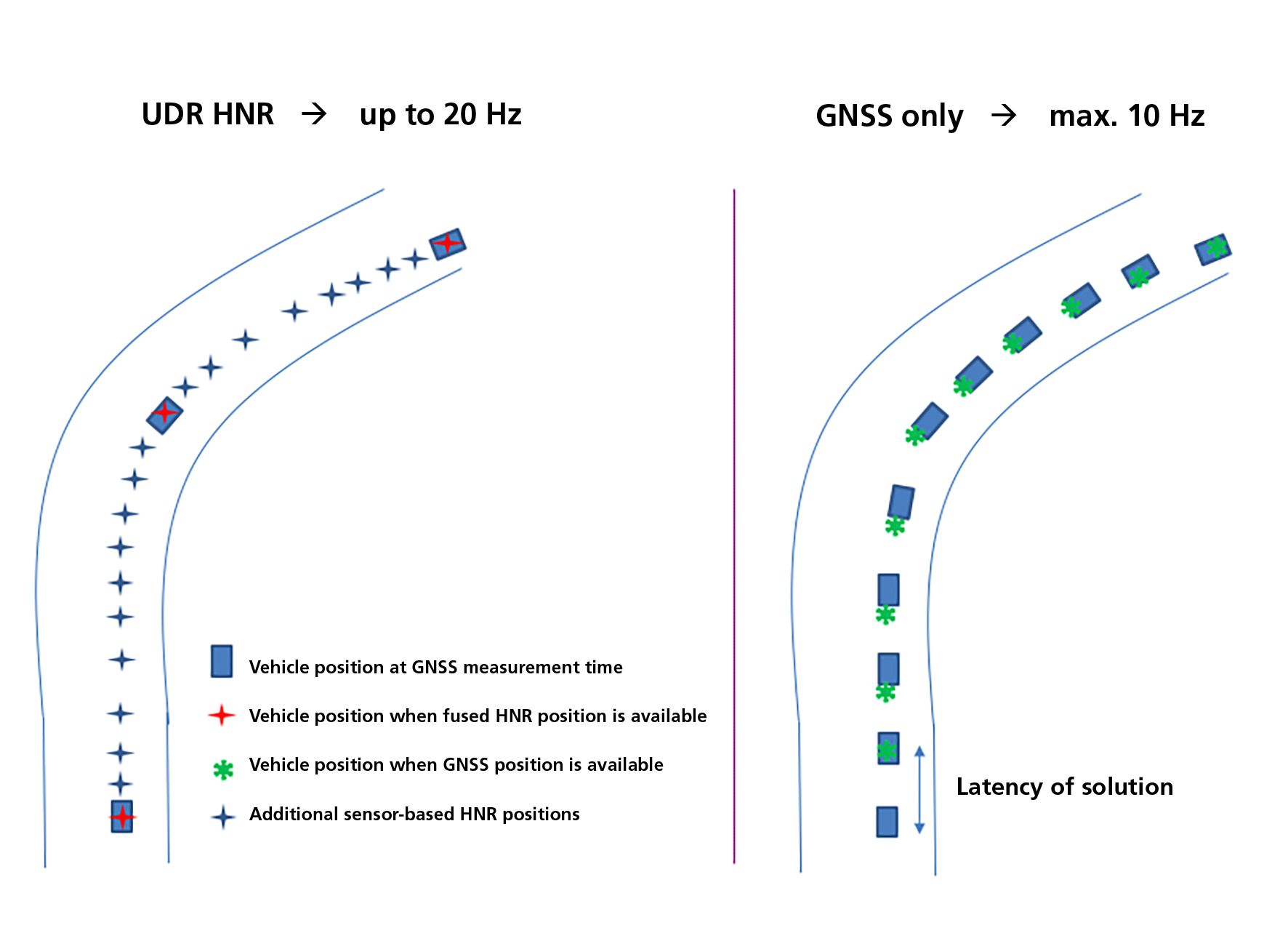
Another important aspect of UDR’s approach is that it has the capability for delivering a high refresh rate of positional data, or a real time high navigation rate (HNR) output. When relying on GNSS signals alone, there is an inherently large latency in the calculation of the position. Typically using GNSS systems in the mass market, this allows a maximum of 10 fixes per second, a refresh rate of 10 Hz. This would reflect the position the vehicle was in when the satellite data was acquired. UDR can double the refresh rate, up to 20 Hz, significantly improving the navigation rate.
comparing GNSS v. UDR approach.
Figure 5 illustrates the impact of latency on the navigation between using GNSS alone versus a UDR solution, the later using the sensor data to complement that received from GNSS. Latency as low as a few milliseconds is achieved, which is key for use in safety applications such as anti-collision systems based on V2X infrastructure and positioning of vehicles against each other. Low latency and high navigation rate are absolute must requirements for V2X applications, to achieve the required reactivity in case of alert.
In the case of u-blox’s NEO-M8U and EVA-M8E module, a raw sensor data stream that contains that from the 3-axis gyro, the 3-axis accelerometer and the module’s temperature sensor is available at a rate of 100 Hz. This data is available to the host application via the UART or I2C compatible interface and could be used to profile driver behaviour, pay-as-you-drive insurance applications or for accident reconstruction.
When contemplating embarking on a UDR-based design, automotive electronics engineers are recommended to carefully research the capabilities of a UDR module and the development tools that might aid the prototyping process and speed time to market. Key considerations will include the operating temperature range, certification to automotive quality standards such as AEC-Q100 and conformance to standards such as ISO 16750 that stipulate the extremes of operating conditions likely to be encountered within a road vehicle. Supporting the initial concept prototyping will be the need for an evaluation kit or reference design that will quickly allow experimenting, for example, with different antenna positions, evaluate different module functionality and visualise overall GNSS and sensor performance.
Untethered dead reckoning delivers a level of vehicle-based navigation previously not possible. Whether driving through tunnels, city areas with lots of tall buildings or parking in a multi-story covered car park, UDR delivers a continuous navigation experience without the need to be attached to the vehicle’s own network and can continue to navigate through short periods of complete signal loss.
About the author:
Florian Bousquet is Market Development Manager at u-blox Holding AG, Thalwil, Switzerland.
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :